Após instalar o editor ladder SCPws1, será necessário configurar dois drivers para a porta USB quando se trata do controlador CP-WS13/8DO8DI2AO2AI. Um destes driver é o driver que permitirá gravar o programa editado e compilado no editor ladder SCPws1. O vídeo a seguir mostra como instalar este driver.
Qualquer duvida quanto a instalação deste driver basta nos contatar !
Os modelos que tem gravação direta pela porta USB podem apresentar um problema de instalação por falta de dois arquivos de sistema que são o libusb0.dll e o libusb0.sys. Por motivos diversos estes arquivos podem estar faltando e devem ser copiados no diretório do windows “C:\Windows\System32” e “C:\Windows\System32\drivers”.
Os dois arquivos de sistema são distribuidos junto com a instalação do editor ladder a partir da versão 2.09. Os dois arquivos estão localizados no diretório “c:\Arquivos de Programas (x86)\PROXSYS\” em sistemas de 64 bits ou “c:\Arquivos de Programas\PROXSYS\” para sistema de 32 bits.
Dentro da pasta PROXSYS, localize a pasta “libusb” e dentro dela os dois arquivos “libusb0.dll” e “libusb0.sys”. O arquivo “libusb0.dll ” deve ser colado dentro da pasta “C:\Windows\System32” e o arquivo “libusb0.sys” deve ser colado na pasta “C:\Windows\System32\drivers”.
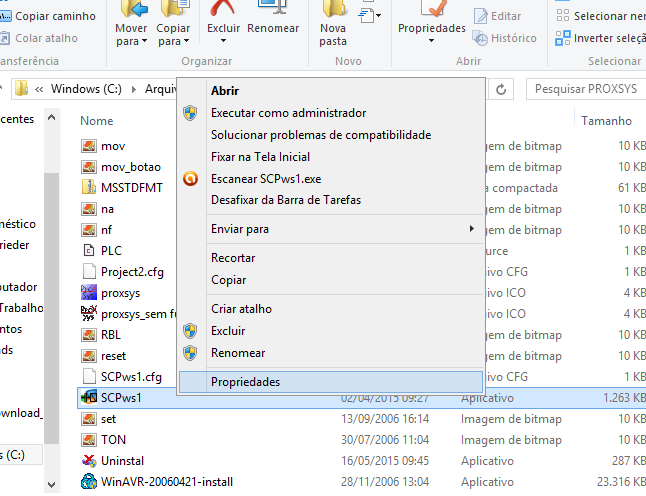
O programa SCPws1, deve ser executado como administrador nos sistemas operacionais windows a partir do windows vista (vista, 7, 8,8,1 e 10), pois são necessárias operações de gravação no drive C. Para isso, localize o programa executável em “c:\Arquivos de Programas (x86)\PROXSYS\” em sistemas de 64 bits ou “c:\Arquivos de Programas\PROXSYS\” para sistema de 32 bits. Localize o executável (.EXE) do SCPws1, como mostra a figura abaixo e clique com o botão direito e escolha a opção propriedades.
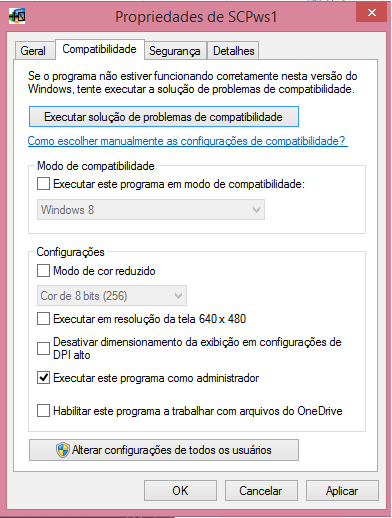
No menu que aparece da figura abaixo, escolha a aba compatibilidade e marque a opção Executar este programa como administrador. Localize e execute o programa editor Ladder SCPws1, que deve estar no menu iniciar tanto no Windows 10, 8, 8.1 e 7.
Pronto o editor ladder SCPws1 está configurado para utilização !
Na aplicação para este tipo de acionamento, o CP-WS11/4DO4DI-OEM utiliza 4 posições de memória dedicadas para configuração da geração de pulsos, 3 memórias do tipo “M” e uma posição do tipo “L” e uma bobina de rele auxiliar tipo R. Estas memórias são :
M21 – Define a rotação do motor em RPM com resolução de décimos de RPM com base em um driver + motor ajustado para 400 pulsos por volta. Neste caso para o motor operar a 300 RPM, deve-se ajustar M21=3000;
M22 – Método de operação da saída digital Q3. M22=0 a saída Q3 tem operação normal como saída digital. Para M22=1 a saída Q3 opera gerando pulsos para drive de motor de passo;
M24 – Forma como a geração de pulsos será controlada. Para M24 = 0 , fazendo um SET da saída Q3, pulsos são gerados até que uma borda de descida na entrada I1 do controlador seja detectada. Para M24= 1, Fazendo o acionando a saída Q3, uma quantidade determinada pelo valor ajustado em L4 de pulsos é gerada na saída Q3. Antes de iniciar a geração de pulsos deve-se zerar o valor de contagem de pulsos através de breve acionamento de R23;
L4 – Quantidade de pulsos a ser gerada na saída Q3 quando M24=1;
R23 – Zera quantidade de pulsos gerados na saída Q3 quando M24=1;
Operação do sistema :
I1 – Entrada que inicia a sequencia de pulsos do motor;
I2 – Acionamento manual do motor sentido retorno;
I3 – Fim de curso superior cilindro pneumático avançado(posição inicial);
I4 – Fim de curso inferior cilindro pneumático cilindro recolhido;
Q1 – Aciona eletroválvula do cilindro pneumático – Avança cilindro;
Q3 – Gera pulsos para drive do motor de passo;
Q4 – Sentido de giro do motor de passo;
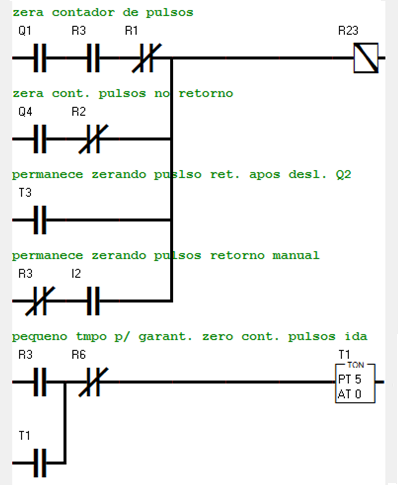
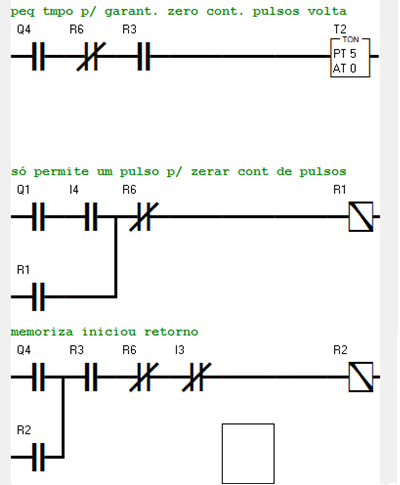
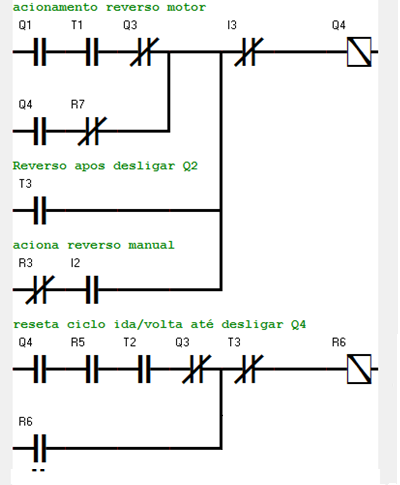
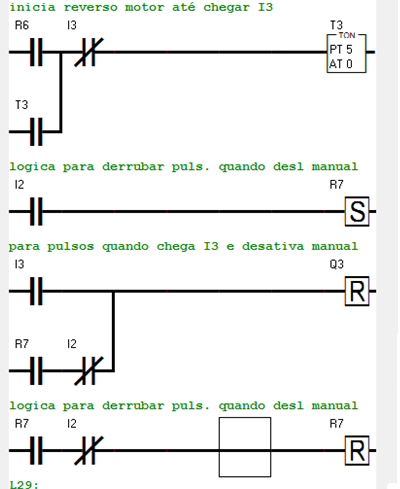
Acionando-se a entrada I1 e estando o cilindro Q1avançado com I3 acionado, aciona-se a saída Q1, o cilindro é recolhido fazendo o conjunto do motor baixar até a peça. O sensor I4 acionado indica que o cilindro está em posição de iniciar a geração de pulsos. Com o acionamento de I4 inicia-se a geração de pulsos de Q3 pela quantidade pré-determinada por L4. Após atingir a contagem de pulsos, o reverso do motor é acionado e pulsos são gerados no motor, mantendo-se o rele auxiliar R23 acionado, ou seja, não parando pelo limite de pulsos. Ao mesmo tempo a saída Q1 é desligada e o cilindro pneumático avança trazendo o conjunto do motor para cima. Quando o sensor I3 é acionado a geração de pulsos e o reverso são desligados. Com o sistema parado ou em repouso, sem acionamento de I1, um acionamento da entrada I2 faz o motor girar no sentido anti-horário enquanto a entrada I2 estiver acionada.
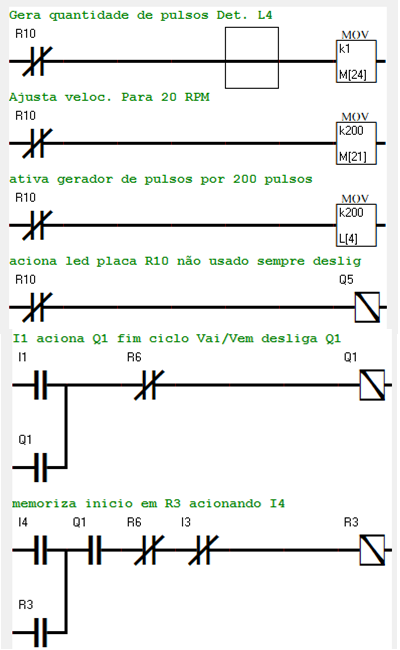
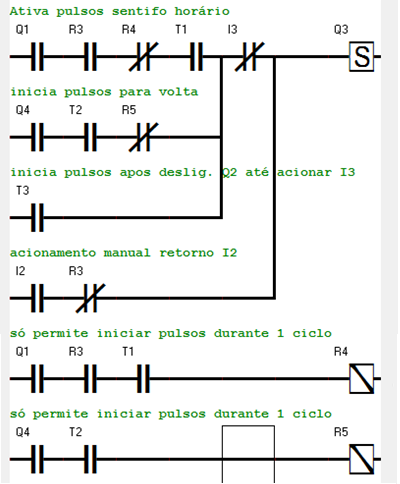
O programa desenvolvido em ladder foi este. O funcionamento final do sistema foi apresentado em um vídeo da parte 1 com mesmo título.
Esperamos com este post ter ajudado aos que precisam de uma aplicação similar em seus projeto !
O objetivo desta aplicação é substituir uma automação existente realizada através de um circuito totalmente pneumático por um CP-WS13/8DI8DO2AI2AO-OEM.
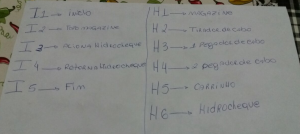
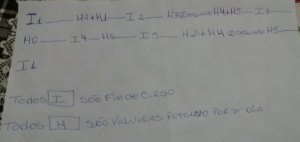
Foi solicitada uma descrição de funcionamento do sistema ao cliente e a resposta foram as duas figuras abaixo, uma descrevendo as entradas e saídas a serem utilizadas com as devidas funções e outra mostrando a sequência de operação. Apesar das escassas informações será realizada a primeira tentativa de desenvolvimento de programa para operação do sistema iniciando com uma descrição de funcionamento mais completa, entrando em contato com o cliente para sanar duvidas. O principal problema é que o cliente está no interior do Paraná e nós estamos em Campinas – SP porém estamos usando comunicação via Skype para sanar duvidas transferir programas etc… . O Startup também será remoto, ou seja, o cliente vai ligar tudo e acompanharemos daqui a partida do sistema
Relação de entradas e saídas utilizadas
Saídas do sistema :
Q1(H1) – cilindro do magazine recuado válvula desligada posição em baixo
Q2(H2) – desligado posição recuado está recolhido eixo motriz a mostra
Q3(H3) – pegador de cabo estágio 1 desligado cilindro recolhido no vídeo todo a esquerda
Q4(H4) – pegador de cabo estágio 2 desligado cilindro recolhido no vídeo todo a esquerda
Q5(H5) – carrinho longitudinal (movimento no sentido do eixo arvore do torno) desligado carro todo a esquerda no vídeo
Q6(H6) – hidro cheque carro perpendicular ao eixo desligado carro recolhido sentido mais afastado do eixo
O vídeo mostra o torno operando com a automação original com elementos todos pneumáticos e serve para observar como o sistema deverá operar.
I1 é um fim de curso que deve estar ativo no início do sistema, segundo informações verbais recebidas. Além das chaves fim de curso, vamos acrescentar um botão para ligar a sequencia na entrada I6 e um botão para parar a sequencia na entrada I7.
A descrição da primeira tentativa após sanadas duvidas de funcionamento fica assim:
Acionando-se I6 (chave liga) estado ligado é memorizado e estando I1(fim curso inicio) acionado será acionado H1 ( Q1 magazine). Aguarda-se o acionamento de I2 (fim de curso topo magazine). Quando I2 acionado aciona-se H3(Q3 – pegador do cabo 1). Aguarda-se 2 segundos aciona-se H4 + H5 (Q4 e Q5 – pegador cabos 2 e carrinho) e desliga H1 ( Q1 magazine),que retorno a posição recuada. Aguarda atingir I3 (fim de curso acionar hidro cheque). Quando I3 acionado ativa H6 (Q6 – hidro cheque) após H6 (Q6 – hidro cheque) acionado aguarda I4( fim de curso retorno hidro cheque) desliga H6. O carro longitudinal está avançado e quando I5 é acionado aguarda 3 segundos ativa H2 (Q2 – extrator peça) e desliga H3 + H4 (Q3 e Q4 –pegadores de cabo 1 e 2), aguarda 2 segundos desliga H5 (retorna carro longitudinal) ao chegar em I1 desliga (Q2 – extrator peça) aguarda 0,5 segundos se I7(chave desliga) não foi acionado durante o processo inicia novo ciclo.
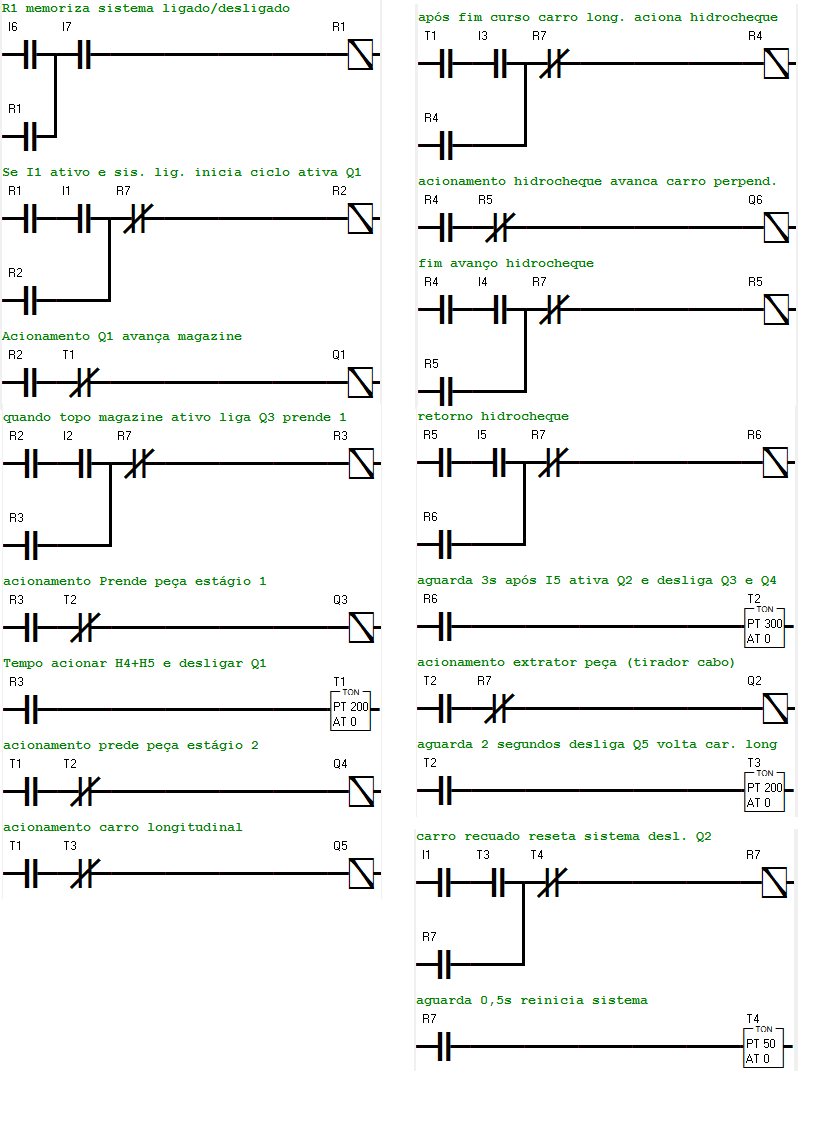
Baseado nesta descrição foi escrito o programa em ladder com o auxilio do editor ladder SCPws1 :
O programa foi gravado no controlador e agora será finalizada a montagem do painel. Assim que for concluída a montagem serão realizados os testes funcionais para validar o programa e fazer as alterações que forem necessárias.
Este post inicia uma série que mostra como é possível aplicar o CP-WS11/4DO4DI-OEM para geração de pulsos para um drive de motor de passo.
O motor de passo é um tipo de motor que opera com o auxilio de um drive que precisa receber sinais adequados para seu funcionamento. O funcionamento de um motor de passo por ser visto em mais detalhes clicando neste link . A escolha do drive para o motor vai depender principalmente da corrente necessária para alimentação correta das bobinas do motor. Neste link pode-se ver em detalhes um modelo de drive para motor de passo.
Como nosso objetivo aqui é mostrar uma aplicação de motor de passo utilizando o CP-WS11 vamos mostrar uma aplicação real em uma operação de rosqueamento. Nesta operação o motor de passo é responsável pelo acionamento de um macho e todo o conjunto é movimentado por um cilindro pneumático com as posições de avanço e recuo monitoradas por sensores conectados ao CP-WS11. Para esta aplicação foi utilizado um CP-WS11 com 1 saida a rele Q1, para acionamento da eletroválvula que movimenta o cilindro pneumático e duas saidas transistor NPN, Q3 pulsos para o motor e Q4 sentido de giro.
Funcionamento do rosqueador e principais elementos
No próximo Post vamos mostrar como foi realizada a programação do CP-WS11 para esta aplicação.
Até lá!
Blog para auxilio na elaboração de projetos com os controladores Proxsys